OpenCV-CameraCalibration-Example
FishEyeCameraCalibration.mp4
OpenCVを用いたカメラキャリブレーションのサンプルです
2021/06/21時点でPython実装のある以下3種類について用意しています。
- 通常カメラ向け
- 魚眼レンズ向け(fisheyeモジュール)
- 全方位カメラ向け(omnidirモジュール)
全方位カメラは以下のような構造のカメラを想定しています。

画像はWikipediaのOmnidirectional (360-degree) cameraから引用
Requirement
- opencv-python 4.5.2.54 or later
- opencv-contrib-python 4.5.2.54 or later ※omnidirモジュールを使用する場合のみ
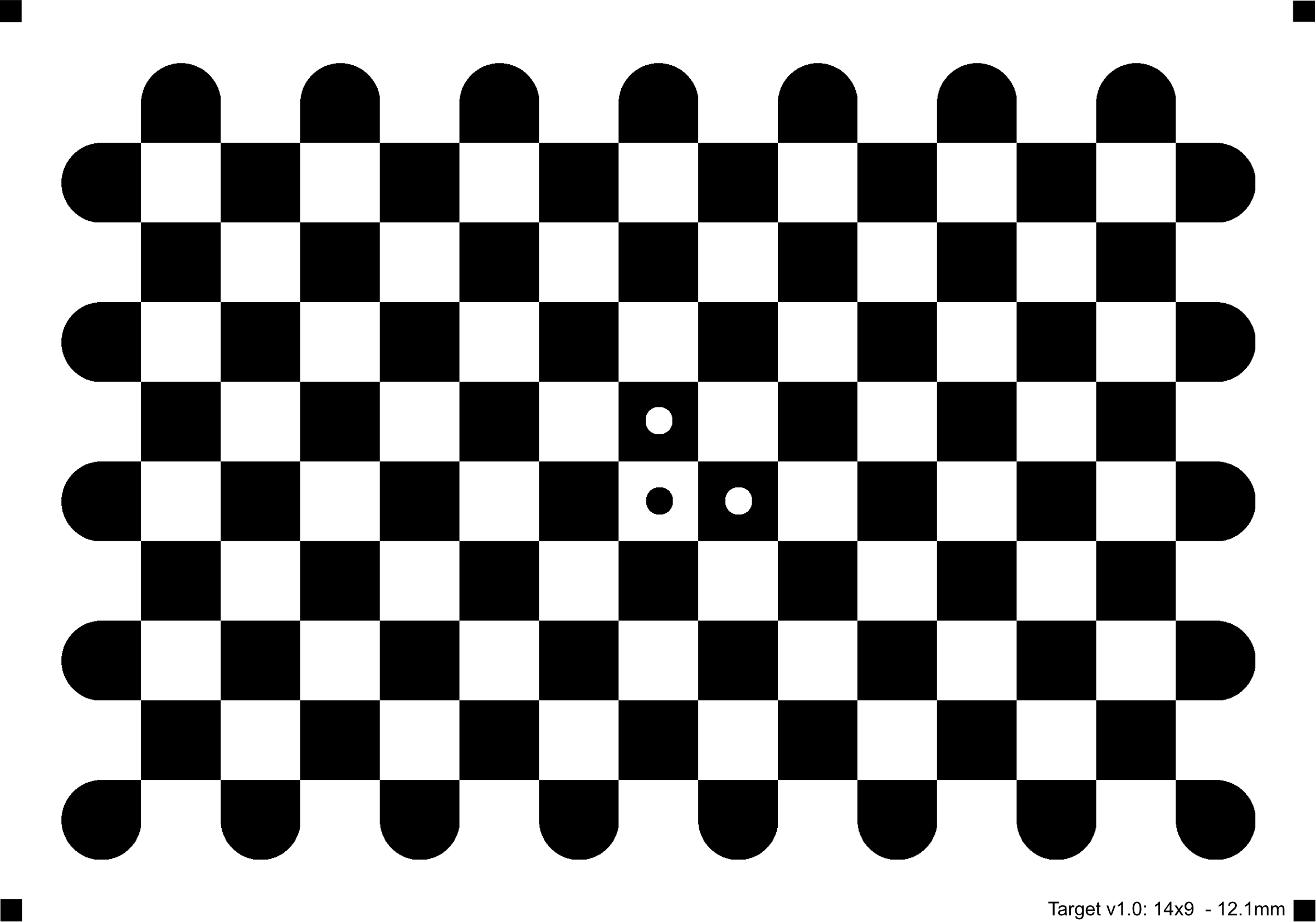
Calibration Pattern
サンプルでは以下の7×10のチェスボード型のキャリブレーションパターンを使用します。
他の行列数のキャリブレーションパターンを使用したい場合は、以下を参照して作成or入手してください。
- https://docs.opencv.org/master/da/d0d/tutorial_camera_calibration_pattern.html
- https://github.com/opencv/opencv/blob/master/doc/pattern.png
また、以下のようなサークル型のパターンやセクターベース型のパターンのサンプルは用意していません。
- https://github.com/opencv/opencv/blob/master/doc/acircles_pattern.png
- https://docs.opencv.org/4.5.2/checkerboard_radon.png
Usage

undistortのサンプルで歪み補正を実施してください。
01.calibrateCamera
python 01-01_calibrateCamera.py
python 02-01_fisheyeCalibrateCamera.py
python 03-01_omnidirCalibrateCamera.py
キャリブレーションパターン検出時にEnterを押すことで撮影します。
ESCを押すことでプログラムを終了し、キャリブレーションパラメータを保存します。
実行時には、以下のオプションが指定可能です。
オプション指定
- --device
カメラデバイス番号の指定
デフォルト:- 01-01_calibrateCamera:0
- 02-01_fisheyeCalibrateCamera.py:0
- 03-01_omnidirCalibrateCamera.py:0
- --file
動画ファイル名の指定 ※指定時はカメラデバイスより優先し動画を読み込む
デフォルト:- 01-01_calibrateCamera:None
- 02-01_fisheyeCalibrateCamera.py:None
- 03-01_omnidirCalibrateCamera.py:None
- --width
カメラキャプチャ時の横幅
デフォルト:- 01-01_calibrateCamera:640
- 02-01_fisheyeCalibrateCamera.py:640
- 03-01_omnidirCalibrateCamera.py:640
- --height
カメラキャプチャ時の縦幅
デフォルト:- 01-01_calibrateCamera:360
- 02-01_fisheyeCalibrateCamera.py:360
- 03-01_omnidirCalibrateCamera.py:360
- --square_len
キャリブレーションパターン(チェスボード)の1辺の長さ(mm)
デフォルト:- 01-01_calibrateCamera:23.0
- 02-01_fisheyeCalibrateCamera.py:23.0
- 03-01_omnidirCalibrateCamera.py:23.0
- --square_len
キャリブレーションパターン(チェスボード)の1辺の長さ(mm)
デフォルト:- 01-01_calibrateCamera:23.0
- 02-01_fisheyeCalibrateCamera.py:23.0
- 03-01_omnidirCalibrateCamera.py:23.0
- --grid_size
キャリブレーションパターン(チェスボード)の行列数(カンマ区切り指定)
デフォルト:- 01-01_calibrateCamera:10,7
- 02-01_fisheyeCalibrateCamera.py:10,7
- 03-01_omnidirCalibrateCamera.py:10,7
- --k_filename
半径方向の歪み係数の保存ファイル名(csv)
デフォルト:- 01-01_calibrateCamera:K.csv
- 02-01_fisheyeCalibrateCamera.py:K_fisheye.csv
- 03-01_omnidirCalibrateCamera.py:K_omni.csv
- --d_filename
円周方向の歪み係数の保存ファイル名(csv)
デフォルト:- 01-01_calibrateCamera:d.csv
- 02-01_fisheyeCalibrateCamera.py:d_fisheye.csv
- 03-01_omnidirCalibrateCamera.py:d_omni.csv
- --xi_filename
Mei'sモデルパラメータxiの保存ファイル名(csv)
デフォルト:- 03-01_omnidirCalibrateCamera.py:xi_omni.csv
- --use_autoappend
キャリブレーションパターン検出時に自動で撮影するか否か(指定しない場合はEnterで明示的に撮影)
デフォルト:- 01-01_calibrateCamera:指定なし
- 02-01_fisheyeCalibrateCamera.py:指定なし
- 03-01_omnidirCalibrateCamera.py:指定なし
- --interval_time
use_autoappend指定時の撮影間隔(ms)
デフォルト:- 01-01_calibrateCamera:500
- 02-01_fisheyeCalibrateCamera.py:500
- 03-01_omnidirCalibrateCamera.py:500
02.undistort
python 01-02_undistort.py
python 02-02_fisheyeUndistort.py
python 03-02_omnidirUndistort.py
実行時には、以下のオプションが指定可能です。
オプション指定
- --device
カメラデバイス番号の指定
デフォルト:- 01-01_calibrateCamera:0
- 02-01_fisheyeCalibrateCamera.py:0
- 03-01_omnidirCalibrateCamera.py:0
- --file
動画ファイル名の指定 ※指定時はカメラデバイスより優先し動画を読み込む
デフォルト:- 01-01_calibrateCamera:None
- 02-01_fisheyeCalibrateCamera.py:None
- 03-01_omnidirCalibrateCamera.py:None
- --width
カメラキャプチャ時の横幅
デフォルト:- 01-01_calibrateCamera:640
- 02-01_fisheyeCalibrateCamera.py:640
- 03-01_omnidirCalibrateCamera.py:640
- --height
カメラキャプチャ時の縦幅
デフォルト:- 01-01_calibrateCamera:360
- 02-01_fisheyeCalibrateCamera.py:360
- 03-01_omnidirCalibrateCamera.py:360
- --k_filename
半径方向の歪み係数の読み込みファイル名(csv)
デフォルト:- 01-01_calibrateCamera:K.csv
- 02-01_fisheyeCalibrateCamera.py:K_fisheye.csv
- 03-01_omnidirCalibrateCamera.py:K_omni.csv
- --d_filename
円周方向の歪み係数の読み込みファイル名(csv)
デフォルト:- 01-01_calibrateCamera:d.csv
- 02-01_fisheyeCalibrateCamera.py:d_fisheye.csv
- 03-01_omnidirCalibrateCamera.py:d_omni.csv
- --xi_filename
Mei'sモデルパラメータxiの読み込みファイル名(csv)
デフォルト:- 03-01_omnidirCalibrateCamera.py:xi_omni.csv
- --k_new_param
Knewパラメータ指定時のスケール
デフォルト:- 01-01_calibrateCamera:1.0
- 02-01_fisheyeCalibrateCamera.py:0.9
- 03-01_omnidirCalibrateCamera.py:0.5
Reference
- OpenCV Camera Calibration Tutorial
- OpenCV Camera Calibration and 3D Reconstruction
- OpenCV Fisheye camera model
- OpenCV Omnidirectional Camera Calibration
Author
高橋かずひと(https://twitter.com/KzhtTkhs)
License
OpenCV-CameraCalibration-Example is under Apache-2.0 License.

 71 Dec 31, 2022
71 Dec 31, 2022
 2 May 31, 2022
2 May 31, 2022
 80 Dec 28, 2021
80 Dec 28, 2021
 496 Jan 05, 2023
496 Jan 05, 2023
 1.7k Jan 04, 2023
1.7k Jan 04, 2023
 169 Dec 30, 2022
169 Dec 30, 2022
 498 Dec 30, 2022
498 Dec 30, 2022
 6 Apr 16, 2022
6 Apr 16, 2022
 1 Feb 12, 2022
1 Feb 12, 2022
 20 May 31, 2019
20 May 31, 2019
 215 Dec 26, 2022
215 Dec 26, 2022
 2 Apr 16, 2022
2 Apr 16, 2022
 27 Dec 07, 2022
27 Dec 07, 2022
 3.1k Jan 05, 2023
3.1k Jan 05, 2023
 128 Sep 12, 2022
128 Sep 12, 2022
 9 Nov 12, 2021
9 Nov 12, 2021
 2 Jul 11, 2022
2 Jul 11, 2022
 5 Mar 09, 2022
5 Mar 09, 2022
 4 Aug 06, 2021
4 Aug 06, 2021
 27 Jun 20, 2022
27 Jun 20, 2022
{kind=link}
{kind=link}
{kind=link}